
Teorie odpružení motocyklu - část 3
Text: Marek Janoušek | Foto: archiv autora | Zveřejněno: 26.4.2017 | Zobrazeno: 21 035x
V posledním díle seriálu o podvozcích motocyklu si ozřejmíme různá netypická konstrukční řešení, podíváme se na síly, které působí na přední a zadní vidlici, a také zjistíme proč se u terénních motocyklů používají větší kola.

Pružení po všeobecné křivce
Paralelogram
Tento typ pružení osciluje mezi typem pružení po kružnici a po všeobecné křivce. Paralelogramová vidlice je v zásadě shodná s vidlicí vahadlovou, kde střed kola při propružení koná všeobecně zakřivenou dráhu vzhledem k rámu. Paralelogramová vidlice se liší od vahadlové jenom rameny se stejnou délkou, která pak spolu s nosníkem vidlice tvoří rovnoběžník – Paralelogram. Tenhle typ kinematicky řadíme mezi pružení po kružnici. Vidlice tohoto typu se dnes používají pouze zřídka, jejich doba skončila krátce po druhé světové válce. Posledním motocyklem s vahadlovou vidlicí vyrobeným v Československu je ČZ 125, kde byla montována pouze do první třetiny výroby.
Vahadlové vidlice jsou v původním provedení kyvným ramenem, v jehož dolním konci je opřena osa kola. Vrchní konec je zavěšen na dvou párech vahadel, které spolu s čepem procházejícím osou řízení tvoří čtyřčlenné ústrojí. K pružení jsou zde využívány zejména tlačné pružiny, zřídka pak tažné, uhlopříčně uložené. V čepech vahadel jsou montovány třecí tlumiče kmitů. Kinematika pružení paralelogramové vidlice je stejná jako při odpružení kyvným ramenem se stejnou délkou jako vahadla. Nevýhodou je, že při poměrně malých zdvizích pružení zde vzniká značná změna stopy. Tohle bylo později řešeno rameny s nestejnou délkou.
Paralelogram se tedy časem změnil na všeobecné čtyřčlenné ústrojí a po dlouhé odmlce se opět objevuje na motocyklu BMW K1200R. Zde již mluvíme o pružení po všeobecné křivce vzhledem k uchycení k rámu. Její řízení je rotací kolem dvou kulových čepů za pružící jednotkou, výhodou je že geometrie řízení při pohybu zůstává beze změny. Nevýhodou této konstrukce je poměrně vysoký podíl neodpružené hmoty oproti ostatním vidlicím, složitá konstrukce a také možnost vzniku vůlí. Protože jsem neměl možnost změřit rozměry osobně a google mi taky nepomohl, neumím říct, jestli jsou délky ramen stejné.
Paralever a telelever
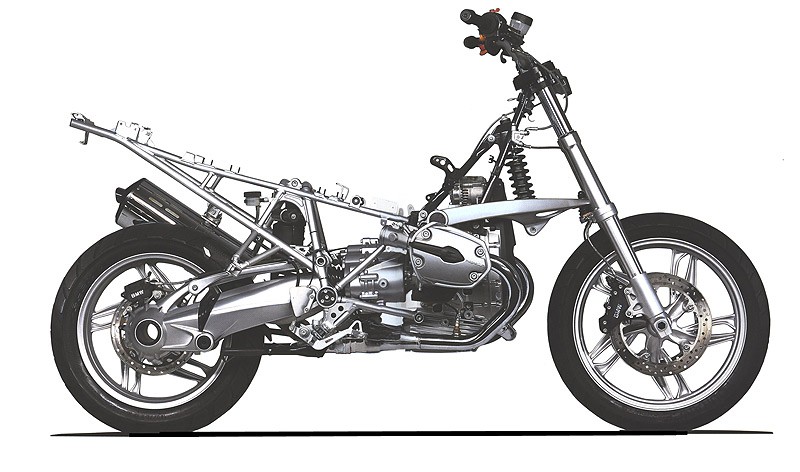
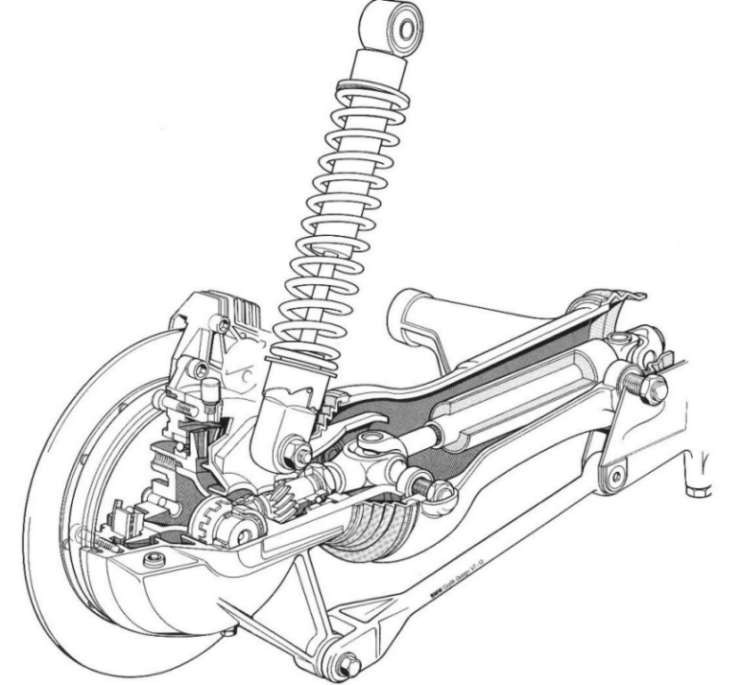
Dalším představitelem pružení po všeobecné křivce pochází samozřejmě také z fabriky BMW a vy jistě víte, že mluvím o Teleleveru. Kinematika pohybu předního Teleleveru a zadního Paraleveru je uvedena na obrázku níže.

Paralever je třeba si představit jako dvě ramena C-x jako nosný člen a D-y jako kompenzační. Zadní trojúhelník „Final Dive“ je tvořen středem kola E s čepy x a y. Dvě ramena s nestejnou délkou pak vstupují do konečného pohybu kola tak, jak je vyobrazen. Kompenzační člen má také za úkol kompenzovat natočení kola při pružení. Vzhledem k tomu, že zadní kolo je hnané, dochází při pružení ke změně úhlové rychlosti na obvodu kola, což způsobuje nadměrný oděr pneumatiky a ztrátu trakce. Při kompenzaci tohoto pohybu tedy získáváme stabilnější trakci při pružení. U první generace paraleveru, jak je vyobrazen (v produkci 1982-2005), je kompenzace natáčení kola vůči vozovce poloviční. Takovéto řešení kompenzace uhlového zrychlení zadního kola můžeme sledovat u Moto Guzzi, kde se jedná pouze o člen kompenzační, pružení je kinematicky stejné s odpružením kyvným ramenem. Druhá generace Paraleveru, jak ji známe z BMW R1200, má kinematiku ještě propracovanější, osa kola je mezi dvěma čepy, tudíž kardanový hřídel musí kompenzovat axiální zkrácení.

Pohon zadního kola řetězem nebo klínovým řemenem takovéto kompenzace nemá zapotřebí, protože tyto způsoby pohonu kola jsou dostatečně pružné.
Vraťme se zpět k obrázku BMW a sledujme pohyb předního Teleleveru. Výsledný pohyb předního kola je pohybem po kružnici s osou, která leží pod rovinou těžiště (jenž podle naložení osciluje kolem vyznačeného bodu T). Při brzdění tudíž nedochází k ponoru pružení, jak je tomu známo u konvenčních způsobů odpružení. Při pohybu vykonává přední kolo rotaci kolem nulové osy, aby se eliminovala změna rozvoru (stejně jako to bývá u zadního pružení), tento pohyb je shodný s pohybem kyvného ramene, jehož délka je větší než by jsme mohli dosáhnout kyvnou vidlicí. Změna závleku předního kola při pružení činí v uvedeném příkladu kolem 3 %. Nevýhodný je pohyb kola směrem do překážky, což způsobuje prudké změny zrychlení tlumiče při průjezdu velkých nerovností. Také můžete mít pocit, že motocykl plave, nebo že odezva řízení je nedostatečná.
Neevropský Springer
Springer je v jisté podobě odpružená vidlice motocyklu Harley-Davidson z roku 1903, jenž byl později pomenován Silent Gray Fellow. Posléze byl montován od r. 1930 do modelu VVL v současně známé podobě, až do šedesátých let, kdy byla sériová produkce ukončena až do příchodu HD Softail Springer po restrukturalizaci firmy. Avšak na přestavbách se objevuje téměř nepřetržitě. Konstrukce spojuje vlastnosti teleskopické vidlice a kyvadlové s krátkým ramenem. Tedy charakteristika odpružení je téměř lineární, ale změna stopy se mění skoro o celou hodnotu propružení. Je typická svým malým zdvihem a nepruží při brždění. Na obrázku níže je vyobrazen Springer ve stlačené poloze.
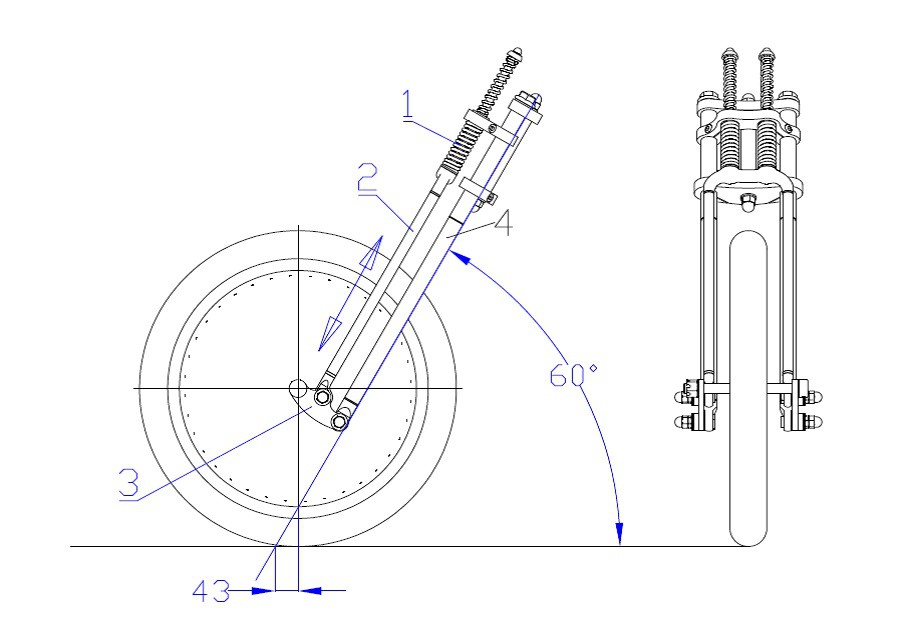
Konstrukčně se jedná o pevnou vidlici (4) krátné kyvné rameno (3) pohyblivou vidlici (2) uloženou v obyčejně mosazném vedení a vinutá pružina (1) jenž se zapírá o extra okulár přichycený na pevnou část.
Může být doplněna tlumičem kmitů, avšak samotným odporem tuhosti pohyblivé vidlice a jejím odporem v pouzdrech je útlum samovolně ovlivněn. Kdyby někdo chtěl postavit svého springera, můžete najít návod v knize ChoppersBuilder Handbook nebo na internetu.
Statická rovnováha sil ve vidlici
Váha motocyklu působí v těžišti. Proto jí můžeme rozdělit na dvě složky procházející osami předního a zadního kola. Reakce působící v ose kola je rovná statickému zatížení, zmenšenému o váhu samotného kola. Tuhle reakci můžeme vektorově rozdělit na dvě složky. Tečná složka působí v ose vidlice a je zachycena pružinami, druhá je normálová směrující do středu křivky dráhy středu kola, která je bez vlivu na zatížení pružin a přenáší se přímo do vedení kola. Tečná síla rovněž ovlivňuje namáhání ve vedení kola. Reakce ve vedení nevznikne jen tehdy, je-li pružící člen v přímém směru dotyčné síly a současně prochází jeho osou kola. Tenhle rozklad sil je uplatnitelný pouze u teleskopických vidlic, které nemají předsazenou osu kola. Jinak musíme řešit přímo rovnováhu členů, jež nesou osu kola.
Jak jsem tak brouzdal po knížkách a internetu, nenašel jsem žádný rozbor sil pro Springra. Tohle rozdělení jste mohli pozorovat již v druhém díle u kyvadlových vidlic. Teď si vysvětlíme všeobecně platné fyzikální principy.
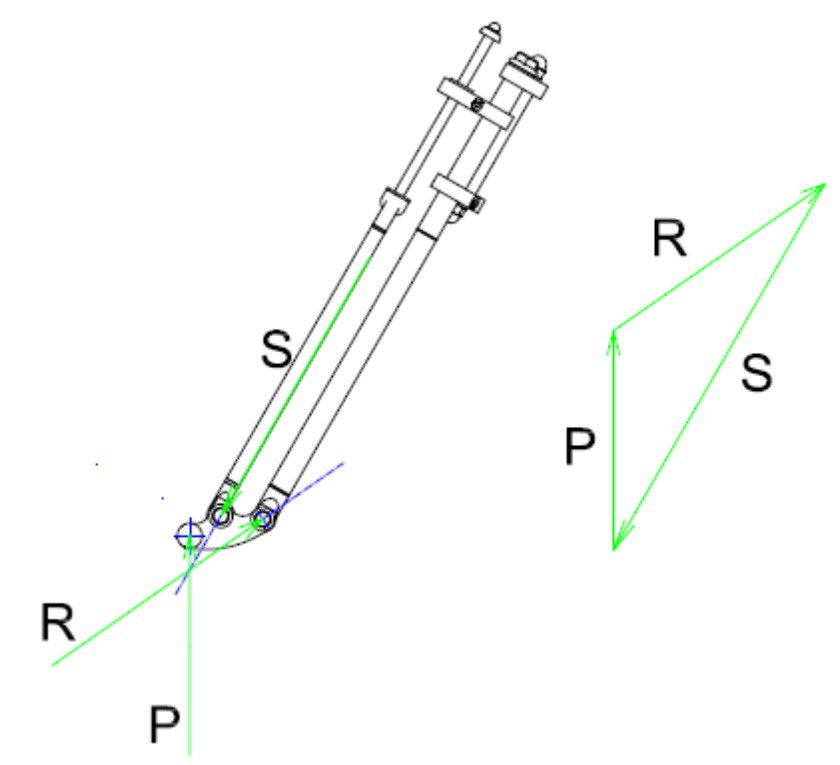
Grafické řešení rovnováhy sil při stlačené kyvné vidlici, kdy poznáme zatěžující sílu P, polohu a směr nositelky S, což je síla která leží v ose pružiny. Reakce v čepu musí procházet uložením vidlice A, a velikost téhle reakce je v rovnováze se silami P a S. Protože zde nemáme více sil, musí reakce procházet jejich průsečíkem X. Tím je daný směr reakce R jako spojnice bodů X a A, takže velikost síly působící v čepu je daná vektorovým sčítáním, jenž je závislé na délce ramen.
Síly působící na kolo motocyklu při průjezdu přes překážku
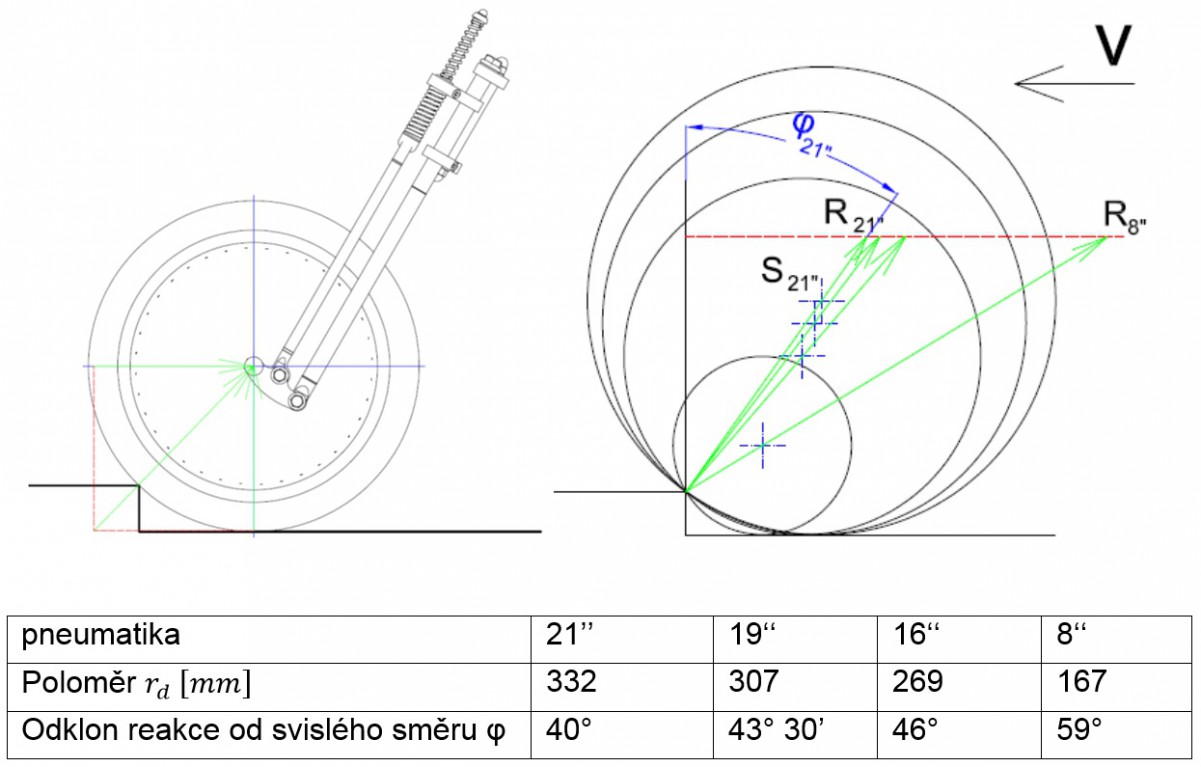
Při průjezdu přes překážku budeme vycházet z předpokladu, že reakce leží jenom v normálu styčné plochy. Tenhle předpoklad však platí pouze při představě nepružného kola. Ve skutečnosti při přejezdu ostrých hran dochází k posunu téhle síly, kvůli deformaci kola a pneumatiky, kde vstupuje do hry také typ pneumatiky. Tedy směr síly pak můžeme zjednodušeně předpokládat z těžiště styčné plochy do středu kola. Obtížnou zůstává velikost téhle síly. Při pomalém přejíždění platí statický rozklad sil doplněný o reakční sílu. Při skutečném určení síly nám do děje vstupuje také nastavení tlumičů, konstanta pružin, poměr neodpružené a odpružené hmoty. V uvedeném příkladu níže je vyobrazen poměr sil při projezdu obrubníku. Také dle tabulky můžete sledovat změnu velikosti síly vzhledem k velikosti kola.
Reakce při brzdění
Síly, které působí na motocykl při brzdění, jsou fyzikálně stejné nebo velice podobné dynamice při zpomalování (opomeneme-li změnu pozice jezdce, jsou stejné). Při brzdění působí mezi vozovkou a pneumatikou tečná síla P_bp, které maximální hodnota je dána součinem vlastní váhy a adheze.
P_bpmax=f_0.F_p [N]
F_p=G_p.g
Součinitel adheze f_0 (trakce) pro obvyklé pneumatiky na drsné vozovce (z betonu nebo hrubého asfaltu) dosahuje hodnoty kolem 1, výjimečně hodnoty vyšší. V běžné praxi se s takovými hodnotami nestýkáme, a tak počítáme při suché vozovce s hodnotami f_0=0,8÷0,9.
Tečná reakce F_b zpomaluje vozidlo a proto působí v těžišti setrvačná síla (součin hmoty a zpomalení) s velikostí shodnou s tečnou brzdnou reakcí. Tyhle síly tvoří silovou dvojici s ramenem h (výška těžiště). Tahle dvojice je v rovnováze s dvojicí, která způsobuje přetížení předního a odlehčení zadního kola F_o. Rameno dvojice tvoří rozvor l. Výsledné zatížení předního kola je tedy F_p+F_o.

Také je možné tyto síly určit pomocí momentové rovnováhy k ose předního kola. Tečna reakce předního kola také ovlivňuje zatížení, tím i průhyb zadního pružení. Jak jsme se již přesvědčili, také zatížení pružin je u různých typů předních vidlic nestejné. Navíc velká změna zdvihu spolu se změnou pozice řidiče z polohy jízdy do polohy brzdění působí malé posunutí těžiště směrem k přednímu kolu (ve statickém pojetí).
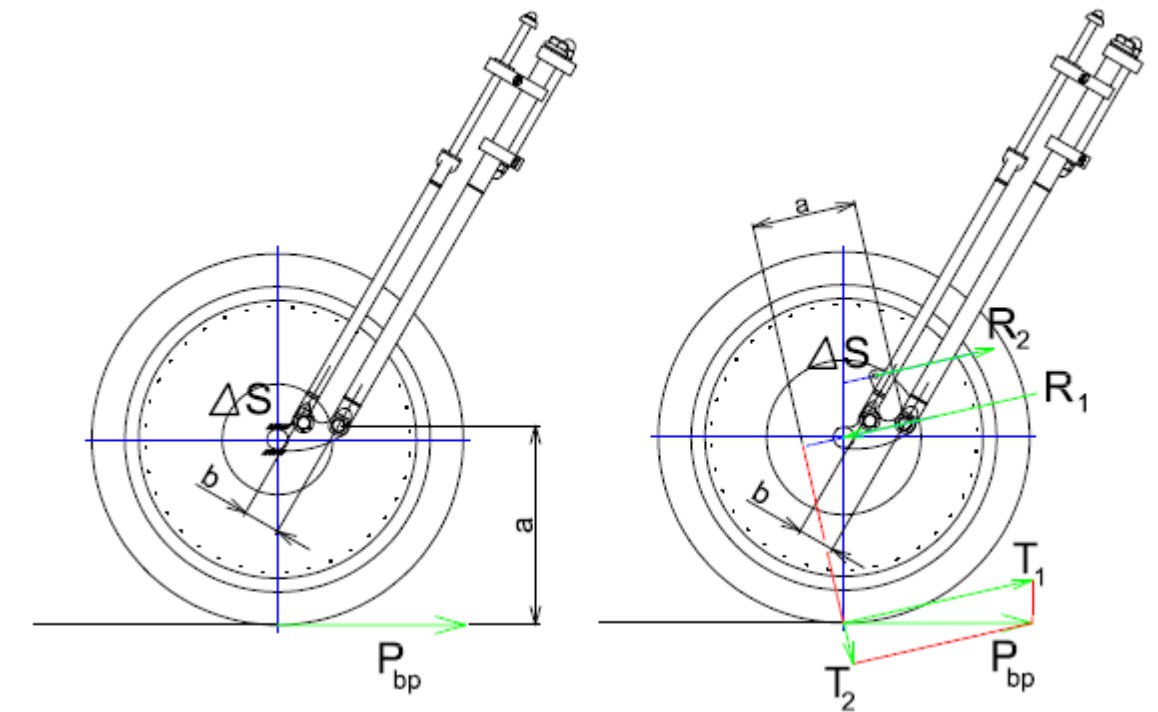
Na obrázku níže je rozbor reakčních brzdných sil mezi dvěma odlišnými způsoby zachycení brzdné reakce. V případu a) je brzdná reakce zachycena přímo na kyvné rameno (brzdový třmen uchycen přímo na rameni), v případu b) je zachycena na předních pohyblivých nohách vidlice (například záchyt reakce bubnové brzdy). Zjišťovat budeme vzrůst síly ∆S z brzdění, tj. tečné reakce P_bp. Rovnováha kyvného ramene z podmínky rovností momentu sil v pružině a tečné síly k čepu ramena.
V prvním případě a) můžeme tvrdit:
P_bp.a=∆S.b
∆S=P_bp.a/b
a,b-ramena na kterých působí síly
V případě b) ovlivňuje sílu v pružině pouze složka síly T_2, kolmá na směr ramena rovnoběžníku tvořeného výkyvným ramenem a jeho rovnoběžkou v místě zachycení reakce na vidlici. Protože složka T_1, rovnoběžná s těmito rameny, způsobuje jen ohybové namáhání ramene a není zachycena pružinou. Podmínka rovnováhy je tedy:
∆S=T_2.a/b
kde velikost síly T_2 je samozřejmě závislá nejen na velikosti tečné reakce P_bp, ale také na sklonu ramen rovnoběžníku. U vodorovného ramene potom bude T_2=0 a ∆S=0, což znamená, že takový záchyt reakce mění charakteristiku pružení a také mění zatížení vidlice vzhledem k propružení.
Síly působící na vidlici při průjezdu zatáčkou
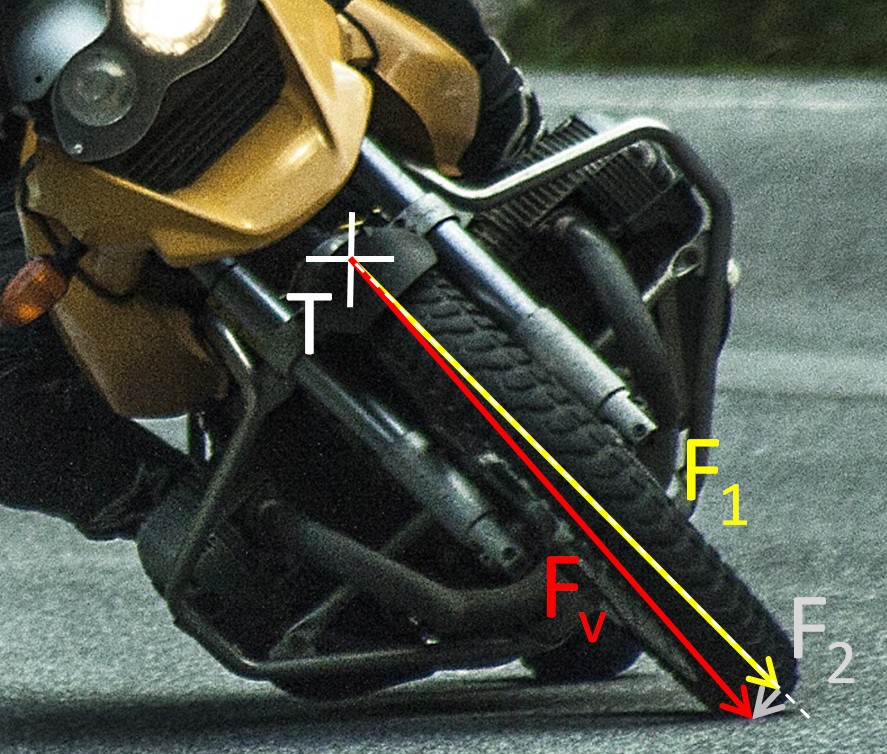
Namáhání vidlice při průjezdu zatáčkou je velice podobné statickému zatížení za předpokladu, že hmotnost motocyklu je vektorovým součtem odstředivé síly (Fod) a hmotnosti motocyklu (G). Avšak všechno samozřejmě není tak jednoduché, jak by se na první pohled zdálo. Tím, že pneumatika má svou šířku a zaoblení, dochází k posunu této síly, protože působí v místě těžiště kontaktu s vozovkou. Tudíž je vyosena z přímého směru, a jak zadní tak i přední vidlice je namáhána také na krut. Jak je vidět v detailním záběru, při rozložení síly Fv, která namáhá vidlici „statickým způsobem“ je značena jako F1 a síla, jenž namáhá vidlici na krut je F2. Tohle vypadá jako nevýznamná složka síly, avšak při použití širokých zadních pneumatik se může rapidně zvyšovat.

Všechny síly, které působí na přední a zadní vidlici jsou většinou kombinací výše zmíněných. Znamená to, že když si třeba změníme šířku nebo výšku pneumatiky, ovlivňujeme tím nejenom geometrii řízení, ale také síly, jenž namáhají vidlici.
Trilogie o odpružení je u konce. Děkuji všem čtenářům, který se dočetli až k těmhle závěrečným řádkům. Nacházíme se v době, kdy si kupujeme motocykly se stavitelným podvozkem, motorky jsou stále lepší a dostupnější pro všechny, servis si už téměř nikdo doma nedělá.
Technologie před pár lety používané ve sportovních motocyklech jsou dnes už standardem. Ale tohle všechno přeci neznamená, že máme ztratit zájem o techniku, kterou používáme na motocyklu denně.
Co by ještě stálo za zmínku je například funkčnost elektronických podvozků, nebo semi-aktivních podvozků, jež snímají podmínky v čase a podle toho také upravují vlastnosti.
Také jsme se nezmínili o řízení rejdovým čepem, jenž v současnosti známe z motocyklů Bimota Tesi nebo Vyrus, ale také z britských motocyklů James Cycle Co. kolem roku 1910 nebo Yamaha GTS 1000..
Tyhle témata jsou však na jinou debatu, možná k více konkrétním technickým řešením než k všeobecným znalostem, které byly nabídnuty v tomhle seriálu. Možná jsem zklamal čtenáře, kteří čekali praktické rady o tom, jak si tutově nastavit podvozek, nebo proč se jim ve 150 km/h rozvibrují při ubrání plynu řídítka.
Chtěl jsem přiblížit konstrukci motocyklů široké veřejnosti a udělat ten nejlepší sumář vědomostí, které jsem před několika lety jako student pracně hledal v knížkách. Tak hurá do sedel a nezapomeňte na pravidelný servis nejen motoru, ale také podvozku vaší jednostopé strojovny.
